

ابتدا میز کار خود را کمی خلوت کنید. سپس دو سروو موتور را بردارید و بازوها را به آنها وصل کنید.

حالا یک قطعه از چسب دوطرفه را برش دهید به طوری که پایین سروو موتور را پوشش دهد؛ درست مثل تصویر زیر:

حالا یکی از سروو موتورها را به صورت 90 درجه به دیگر سروو موتور بچسبانید. مانند زیر:

از دو عدد کش لاستیکی استفاده کنید و آنها را دور سروو موتورها بپیچید؛ همان طور که در تصویر زیر نشان داده شده است برای محکم کردن اتصال سروو موتورها این کار را انجام می دهیم:

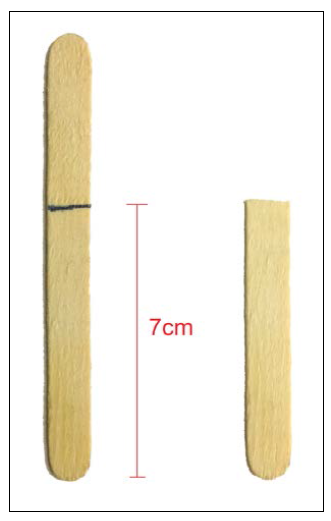
این همان مفصل ران(hip joint) است که قبلا در مورد آن صحبت کردیم. حالایک چوب بستنی بردارید و از یک طرف آن به اندازه ی 7 سانتی متر علامت بزنید و آن را ببرید:
حالا یک بازوی دوطرفه ی سروو موتور را در لبه ی چوب بستنی برش داده شده قرار دهید و دو عدد پونز در آن فشار دهید به طوری که یکی از آنها در مرکز و دیگری در حفره ی کوچکی که بین بازو قرار دارد، قرار گیرد. مانند تصویر زیر:

حالا پین ها(پونزها) و بازوی سروو موتور را بیرون بیاورید. با استفاده از پونزها سعی کنید سوراخ های ایجاد شده در چوب بستنی را کامل کنید. توصیه می شود که پین ها را به درون چوب بستنی به یکباره فشار ندهید، زیرا این کار باعث می شود که در طول چوب بستنی ترک و شکستگی ایجاد شود و استحکام آن کم شود. از یک حرکت نرم چرخشی برای فشار دادن پین به درون چوب بستنی استفاده کنید.

برای متصل کردن بازوی سروو موتور به چوب بستنی، ما از یک پیچ استفاده می کنیم که در محور سروو موتور می رود و از یک گیره ی کاغذ نیز استفاده می کنیم. اکثر گیره های کاغذ، مانند نمونه ای که در تصویر زیر نشان داده شده است، فلزی هستند و یک پوشش پلاستیکی دارند:

ما تنها به سیم فلزی درون گیره ی کاغذ احتیاج داریم. برای دسترسی به میله ی آهنی، ابتدا آن را راست کنید تا یک خط صاف به دست بیاوریم.اگر انجام این کار با دست سخت است، می توانید از یک انبردست استفاده کنید.

حالا با یکی از دستان خود، یک انبر دست بردارید و با دیگری یک سیم چین بردارید و سپس پوشش پلاستیکی گیره ی کاغذ را جدا کنید.

گیره ی کاغذ را به دو نیمه تا کنید و سپس آن را نصف کنید:

بازوی سروو موتور را بر روی همان حفره های قبلی چوب بستنی قرار دهید. یکی از نیمه های گیره ی کاغذ را درون حفره ی بازو قرار دهید(منظورمان حفره ی مرکزی نیست). گیره ی کاغذ را طوری تا کنید که بازو را نگه دارد و قفل کند. برای انجام این کار می توانید از انبردست استفاده کنید. مراقب لبه های تیز سیم باشید.

گیره ی کاغذ صاف شده را خم کنید بازوی سروو موتور را به چوب بستنی محکم کند و ببندد.

حالا به سروو موتور پایینی توجه کنید. این سروو موتور را به بازوی مربوط به خود متصل کنید، به طوری که چوب بستنی عمود به سمت پایین باشد:

وقتی که موقعیت چوب بستنی خوب بود، به آرامی چوب بستنی را با استفاده از یک پیچ که به همراه سروو موتور به شما داده شده است، به سروو موتور پیچ کنید. با این روش می توانیم به زاویه های تقریبی زیر برسیم:

حالا یک سروو موتور دیگر بردارید و یک چسب دوطرفه در زیر آن بچسبانید. این سروو موتور را به بالای چوب بستنی به نحوی بچسبانید که لبه ی سروو موتور بر روی لبه ی چوب بستنی قرار گیرد:

حالا با استفاده از کش ها، این سروو موتور را محکم ببندید:

این سروو موتور بعنوان مفصل زانو مورد استفاده قرار می گیرد. حالا یک چوب بستنی دیگر بردارید و از یک طرف آن به اندازه ی 6.5 سانتی متر علامت بزنید و آن را برش دهید. مانند کارهایی که قبلا انجام دادیم، یک بازوی سروو موتور را بردارید و آن را در لبه ی چوب بستنی قرار دهید. این بار آن را در لبه ی صاف چوب بستنی قرار دهید. سپس از دو پین یا پونز کمک بگیرید و حفره های ضروری را ایجاد کنید:

با استفاده از پین ها(پونزها) حفره ها را ایجاد کنید و بازوی سروو موتور را به آن متصل کنید. با استفاده از نیمه ی دوم گیره ی کاغذی که پوشش پلاستیکی آن را جدا کردیم، بازوی سروو موتور را به چوب بستنی محکم کنید. سروو موتور زانو را در وسط قرار دهید و چوب بستنی را به صورت زیر متصل کنید:

وقتی که با حرکت زاویه ای چوب بستنی مشکلی نداشتید، آن را محکم پیچ کنید. شما باید بتوانید با این مفصل، زاویه های زیر را ایجاد کنید:

اکنون ما یکی از چهار پای ربات را ایجاد کردیم. و سه پای دیگر وجود دارد که باید ایجاد کنیم. شما می توانید دقیقا به همین طریقی که این پا را ایجاد کردیم، یک پای دیگر نیز ایجاد کنید.
حالا نیاز داریم تا یک جفت پای دیگر ربات را نیز ایجاد کنیم. تنها تفاوت آنها روشی است که سروو موتورهای ران را به یکدیگر متصل می کند:

این پاها منعکس یافته ی یکدیگر هستند. حالا دو پا با آن مفاصل ایجاد کنید. وقتی که شما چهار پابه صورت زیر ایجاد کردید، می توانیم به این کتاب ادامه بدهیم:

حالا نیاز داریم بیس یا همان سقف ربات را ایجاد کنیم. بنابراین چهار چوب بستنی با طول یکسان بردارید و آنها را به صورت زیر روی یکدیگر قرار دهید:

چوب بستنی ها را طوری قرار دهید که سرهای دایره ای شکل آنها بیرون از چهار ضلعی قرار گیرند.حالا با استفاده از چسب چوب آنها را به خوبی بچسبانید. حالا برای اینکه این بیس محکم تر شود، تعدادی چوب بستنی به صورت زیر روی آن قرار دهید و آنها را به آن بچسبانید:

حالا سقف(بیس) آماده است. تنها چیزی که باقی مانده است این است که هریک از پاها را به گوشه های سقف متصل کنیم. برای انجام این کار، در فاصله ی 2 سانتی متر از هر گوشه ی سقف یک علامت بزنید. حالا مثل آنچه که قبلا انجام دادیم، یک بازوی سروو موتور را در یک محل علامت زده شده قرار دهید و با استفاده از دو پین یا پونز آن را وصل کنید؛ سپس در این نقاط که کمی سوراخ شده اند با استفاده از پونزها حفره ایجاد کنید. و یک گیره ی کاغذ که روکش آن جدا شده است را در سوراخی که در مرکز نیست قرار دهید و بازو را در مکان خود محکم ببندید. این کار را برای هر چهار گوشه ی سقف انجام دهید. نتیجه به صورت زیر خواهد بود:

ممکن است برای شما، بازوها یکسان باشند. اما در مورد شکل و ظاهر آنها نگران نباشید. در این پروژه نویسنده از بازوهایی با شکل متفاوت استفاده کرده است تا بین سروو موتورهای جلو و عقب تمایز ایجاد شود. شما به زودی متوجه خواهید شد که تعداد زیاد سیم هایی که از قسمت های مختلف پروژه عبور می کند گیج کننده خواهد بود. حالا تنها کاری که باید انجام دهیم این است که پاهای ربات سگ نما را متصل کنیم. استخوان ساق پا(calf bone) باید به سمت بیرون باشد. این استخوان به ربات تعادل کافی می دهد تا بتواند بایستد. حالا سروو موتور را در وسط قرار دهید و پای مورد نظر را مانند تصویر زیر متصل کنید:

این کار را برای هر چهار پای ربات انجام دهید. نتیجه به صورت زیر خواهد بود:

در تصویر زیر ربات سگ نما را به صورت ایستاده مشاهده می کنید:

اگر شاسی به خوبی ایجاد شده باشد، می تواند حتی یک کاسه را حمل کند:

اکنون بدنه ی ربات ما کامل شد.

